成都工博会:正运动技术以自主核心,助力智造新未来

01 展会名称:
成都国际工业博览会
02 展会日期:
2026年3月11日-13日
03展馆地点:
中国(成都)西部国际博览城
04展位号:
15H-A008

● 展会导读
2026年3月11-13日,成都国际工业博览会将于中国(成都)西部国际博览城隆重启幕。
“创链新工业,共碳新未来”——正运动技术精准聚焦中国智能制造,提供可高速高精、安全可靠的运动控制解决方案,助力客户在多品种、快交付的生产场景中,实现效率与产能的双重提升。
同时,正运动提供可面向多个细分行业的标准化工艺包,具备良好的可迁移与复用性,能帮助客户快速实现稳定量产,灵活应对从多批次、多品类到小批量的各类生产需求。方案不仅通过软硬件解耦降低了多套系统集成的复杂性与维护成本,更以国产自主可控的核心技术,为生产智能控制环节筑牢安全基石。
正运动技术诚邀您亲临【15H-A008】展位,在展位现场共同交流,与我们共同探索行业新趋势,共话智造新篇章!
运动控制产品预览
全国产EtherCAT宽温阈运动控制边缘控制器:ZMC432HG

高性能EtherCAT总线运动控制器,软硬纯国产,为多工位自动化产线应用解锁更多可能性!
● 32轴运动控制,支持点到点到多轴同步控制;
● 板载6路差分脉冲轴接口和编码器轴接口;
● 一根网线即可轻松实现与多组网络设备的远程通信和实时控制;
● 支持高速PWM输出、1D/2D/3D PSO硬件位置比较输出、视觉飞拍、高速硬件锁存等。

▲ 工信部认证评估报告 ▲
开放式激光振镜运动控制器:ZMC408SCAN-V22

开放式激光振镜运动控制器,集成激光控制、振镜控制和总线轴/脉冲轴控制,助您实现高速高精的EtherCAT总线运动控制+激光振镜解决方案。
● 高度集成化:将激光控制、振镜与多轴运动控制功能集成于一体;
● 降本增效:大幅降低系统复杂度,节省多套硬件成本,同时提升系统稳定性与响应速度;
● 实时控制:支持高速PSO、PWM、速度前瞻等多个实时控制功能,有效保障加工轨迹平滑,提升加工质量与产能;

▲高精度PSO,等间距输出▲

▲PWM,模拟量与速度同步输出▲
● 开放易用:提供图形库、三轴/四轴联动库、速度前瞻库等一系列丰富库函数,助力用户高效开发专属激光系统,强化核心工艺控制能力;
● 智能协同控制算法:依托自主研发的图形轨迹规划算法,实现振镜与运动平台的高精度协同,进一步提升加工效率与加工精度。

高集成机器视觉运动控制一体机:VPLC7系列

x86平台实时Windows机器视觉EtherCAT运动控制器,集成视觉、运动控制、IO控制以及监控等一体化控制。助您轻松实现高速高效的“机器视觉+运动控制”方案!
●可选4-64轴运动控制(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us;
● 内置强实时运动控制内核MotionRT750,支持第三方视觉软件;
● 板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出;
● 基于x86架构的EtherCAT总线视觉运动控制器,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程;
● 支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作;
● 提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。

正运动全自主强实时运动控制内核:MotionRT750

全自主实时运动控制内核,驱动工业智造新高度!支持254轴高精度协同,125μs极速响应;冗余通讯为安全生产保驾护航,效能跃升20%+,定义运动控制新标杆!
● 可支持多达254轴的高精度运动控制;
● 控制周期可低至125μs,显著提升设备性能;
● 单条指令的交互时间快至us级。相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上;

● 环形冗余架构可显著提升系统可靠性与运行稳定性,可有效杜绝非计划停产导致的产能损失;

● PC蓝屏/宕机/崩溃仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
12轴脉冲全闭环运动控制器:ZMC412CL

多轴位置反馈闭环控制的12轴总线型运动控制器。适用于高精密加工场景应用,助您实现高精度、高响应速度的运动控制!
● 本身支持12轴,最多可扩展至32轴。
● 24路通用数字量输入,8路高速锁存,12路通用数字量输出,2路PWM输出和4路PSO硬件比较输出。
● 支持2路模拟量输出DA。
●以太网接口,可实现生产线或系统的远程控制、集散控制。
● 兼容步进、马达、伺服等常见电机,可以实现直线插补、圆弧插补、螺旋插补等平面和空间轨迹控制要求。
● 支持开环、半闭环与全闭环控制下的相对/绝对运动、点动、用户坐标系运动及多轴联动等功能。
● 集成ABZ增量式与SSI/BissC绝对式编码器反馈接口,支持步进半闭环/全闭环控制,同时支持双反馈(电机端编码器 + 光栅尺)闭环控制。

运动控制解决方案应用预览
大幅面联动激光打标焊接运动控制解决方案

(1)方案使用产品:
开放式激光振镜运动控制器ZMC408SCAN-V22
(2)应用优势:
多振镜协同控制
支持多组振镜同步运行,适配不同尺寸工件,实现高效高精度打标与焊接。
高速高精度打标
激光+振镜+运动控制一体化,自动校正偏差,保障高速高质加工,减少废品。
专用激光工艺API
支持多种图形处理和工艺优化,简化生产流程,便于自定义开发,灵活适应需求。
振镜与伺服轴联动
精准激光束定位与动态跟踪,实现复杂形状高质量加工,运行更平稳。
高精度PSO控制
等间距输出,解决传统激光加工在倒角激光加工能量输出不恒定的问题,提高激光振镜打标、焊接质量。
柔振机械手视觉上下料解决方案

(1)方案使用产品:
机器视觉运动控制一体机VPLC712
(2)方案简介:
将“柔振供料+视觉+机械手控制”进行软硬深度耦合,零件无论以何种姿态堆放,都能被视觉系统精准定位,并完成下发指令给机械手完成柔性上料操作,大幅提升无序分拣效率;可保存多物料的视觉与运动控制配置,一键切换工艺包。新零件仅需更换识别模板或参数,可大幅缩短换型周期并提高生产效率,轻松满足多品种、小批量、多批次订单的柔性生产模式需求。

(3)应用优势:
多结构柔性供料
支持市面上常见的XYZR模组机械手、DELTA并联机械手、SCARA机械手等,同一套柔性视觉供料解决方案界面,根据应用场景不同,选择相应结构。

软硬件高度集成
集成IO控制、机械手控制、机器视觉、运动控制与通讯于一体,无需额外配置工控机、机器人控制电柜箱、降低成本的同时提升设备安装空间,缩短项目开发周期与技术维护难度。
功能操作简单
易于理解和快速掌握的调试界面,将机械手调试、机器视觉调试、柔振盘调试等功能集成在一个页面。面向多品种小批量的物料,实现高效快捷产品换型。

一键快速生成视觉模板
快速搭建视觉工具流程,无需编写复杂的上位机视觉代码。通过拖拽视觉工具完成功能实现,框选式建模板使用更加简单。

工艺功能丰富
支持阵列摆盘、定点供料、自定义装配、盘中盘阵列、圆型摆盘、下相机飞拍、皮带动态抓取、圆形柔振盘动态抓取等,满足市面上常见应用需求。

自定义功能扩展
支持用户通过Basic语言、HMI组态实现自定义功能拓展,以及周边附加轴与IO逻辑控制,完成部分非标动作工艺的修改。

我们诚挚邀请您莅临【15H-A008】展位,与我们的专业团队面对面交流,共同探讨工业自动化的新思路与合作契机。

审核编辑 黄宇
相关文章
-
董事长官宣辞职!中百集团迎来高层更迭,新任董事候选人就位,公司上半年持续亏损
-
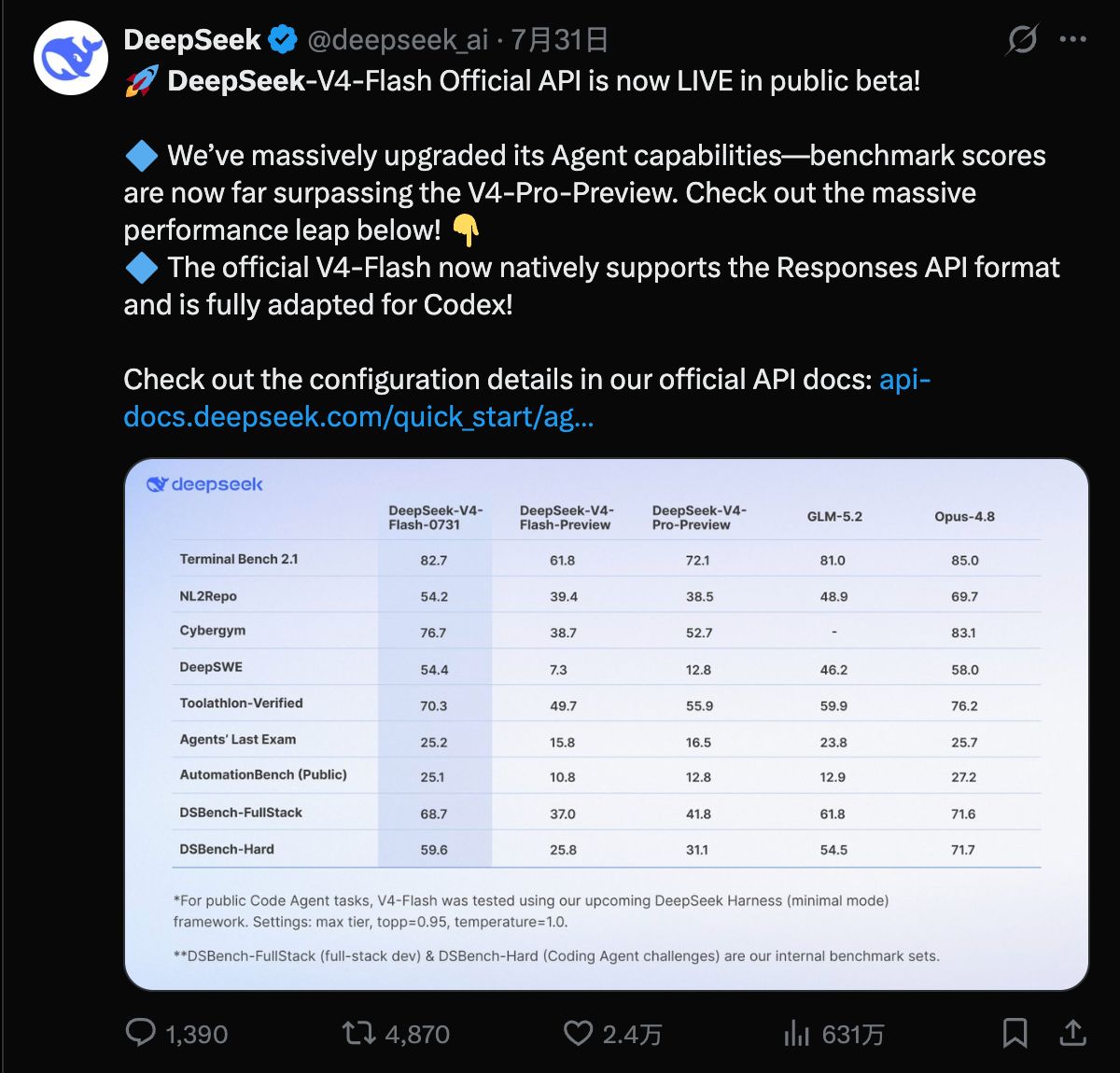
DeepSeek V4-Flash正式版来了!AI开发者实测:价格“很香” Agent能力直追顶级模型
-
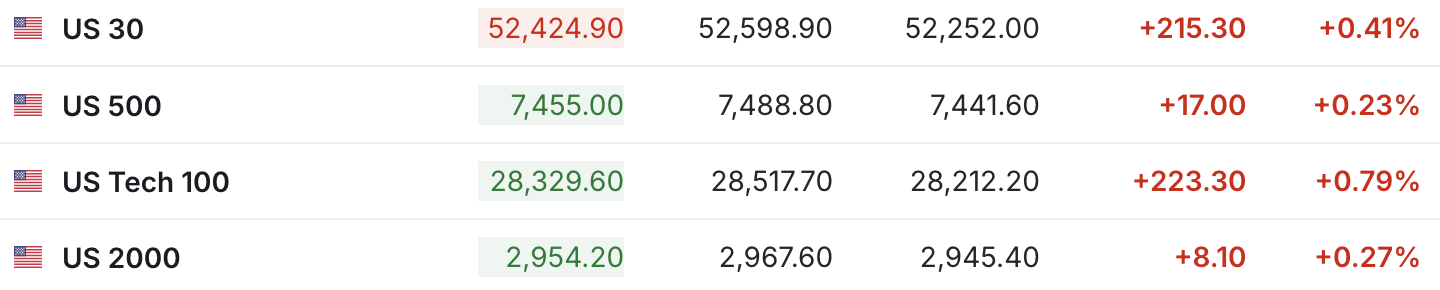
亚马逊财报提振AI信心 美股期指走高 苹果盘前跌近8% | 今夜看点
-

伊称打击多个美军基地;宇树科技8月10日申购|21早新闻
-
标准落地即行动!光伏行业价格合规指导活动在即 统一成本核算“红绿灯”亮起
-

两大白酒巨头,同日高管调整
-
维琪科技正式登陆北交所 重新定义化妆品原料创新
-

最新!拆解7万亿银行系公募